K-기술 리포트
‘월드 스마트시티 엑스포 2024’
레벨4 자율주행 알아보기
자율주행4단계
인공지능
미래기술
과학기술정보통신부와 국토교통부는 지난 9월 월드 스마트시티 엑스포 2024를 개최했다. 올해로 8회째를 맞이한 이 행사에서 스마트시티 기술・서비스 전시파트를 통해 미래 자율주행 모빌리티 기술이 다수 선보여졌다. 이곳에서 소개된 레벨4 자율주행이란 무엇인지 알아보자.
미래 스마트시티, “BETTER LIFE IS HERE”
아태지역 최대 스마트시티 행사인 ‘월드 스마트시티 엑스포(WSCE) 2024’는 전 세계 스마트시티 리더가 한자리에 모여 보다 나은 도시를 함께 만들어 나가기 위한 기술 교류의 장이다.
이번 WSCE는 “BETTER LIFE IS HERE” 이라는 슬로건을 바탕으로 스마트시티 분야의 혁신 기술과 서비스를 전시하고, 산·학·연·관이 참여하는 다양한 콘퍼런스를 개최했다.
특히 2022년부터 전시장 내에서 자율주행체험존을 운영하며 실제 시민들이 무인차량을 체험해볼 수 있도록 하고 있다.
자율주행 ‘레벨 4+’ 상용화 합동사업단 출범

이미 정부는 사람이 운전대에 완전히 손을 뗀 상태로 달리는 완전자율주행 ‘레벨4’ 시대에 맞춰 움직이고 있다.
인프라와 사회 서비스까지 자율주행에 발맞춘 ‘레벨4+’를 천명하고 지난 2021년 3월,
과학기술정보통신부와 산업통상자원부, 국토교통부, 경찰청 4개 부처가 포함된 ‘자율주행기술개발혁신사업단’ 출범을 알렸다.
자율주행기술개발혁신사업단(이하 사업단)은 4개 부처가 자율주행기술개발혁신사업의 보다 유기적인 추진과 연구성과의 사업화 강화 등을 위해 신설한 공익법인이다.
민간에서 오랜 기간 자율주행 신기술 개발을 담당한 사업단장을 포함 총 17명의 인력으로 구성됐다.
사업단은 그간 부처별로 분절적으로 추진된 자율주행기술개발혁신사업을 총괄 기획・관리하고,
사업성과의 보급・확산 등 사업화 촉진은 물론 공공-민간 협력의 가교 역할 등을 중점 추진한다.
자율주행기술개발혁신사업은 2027년 ‘융합형 레벨 4+’ 자율주행 상용화 기반 완성을 목표로 금년부터 2027년까지 총 1조 974억원이 투입되는 다부처 사업이다.
‘융합형 레벨4+’란, 레벨4 수준의 자율주행은 물론 인프라와 사회 서비스까지 포함한 산업 전반의 고도화를 의미한다.
완전 자율주행으로 가는 길

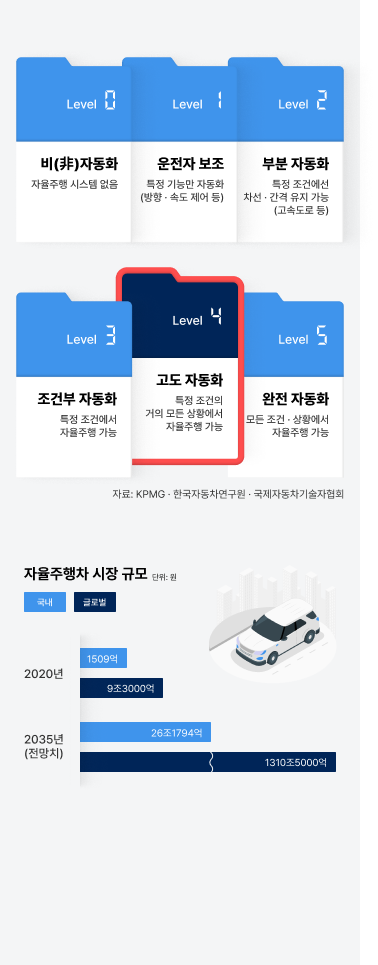
레벨 4인 ‘완전 자율주행(High automation)’은 도로 대부분에서 운전자 개입이 불필요한 단계다.
즉, 도심의 특정구역에서 승객이 원하는 목적지까지 자율주행 시스템을 통해 차량이 주행하는 것을 의미한다.
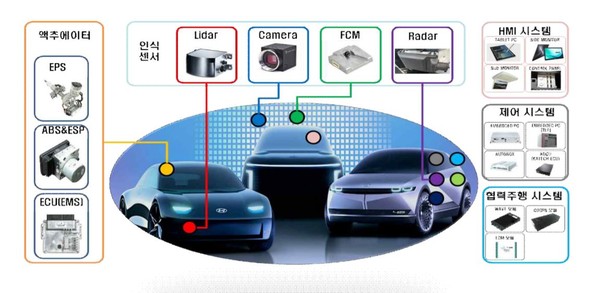
자율주행의 핵심은 소프트웨어에 있다.
지금까지 자율주행차는 인텔, 엔디비아 등 글로벌 반도체 기업과 협력해 고성능 자율주행 반도체 프로세수(AP),
고정밀 라이다(LiDAR), 레이더, 후방카메라, 외부 마이크, 습도 센서, 고정밀 지도(HD맵) 등을 이용해 진화해왔다.
레벨 4 자율주행인 지정구역에서의 완전자율주행이 가능하기 위해서는 지정구역 내에서 주변 상황 인지와 정확한 위치인식 기술이 필요하다.
카메라·라이다 등의 센서를 이용하여 주변 동적/정적 물체를 구분할 수 있는 상황 판단 기술 및 주행 경로 예측 기술이 필요하다.
또한 일반 상황이 아닌 우천·강설·안개 환경, 주행 영역 내 사고 환경 등 예측할 수 없는 복잡한 상황에 대한 인지 및 회피 전략이 수립되어 있어야 한다.
이와 같이 일반적인 또는 복잡한 환경에서의 데이터 처리 및 자율주행 인공지능(AI)
소프트웨어를 완성하기 위해서는 자율주행 운행 구역 내 다양한 환경에서의 센서 데이터 수집이 우선적으로 이루어져야 한다.
또한 센서 데이터에 HD맵 정보가 더해져 차량의 현 위치를 수 cm 이내로 정확하게 파악하여 사고를 예방하여야 한다.
그러나 HD맵은 대부분 고가의 이동형 측량시스템(MMS; Mobile Mapping System)을 이용해서 데이터 취득을 한 이후에,
매뉴얼한 후보정 등을 거치므로 신속한 업데이트가 어렵다는 단점이 있다.
<자율주행차 상용화 관련 자료 - 산업부>
뿐만 아니라 인공지능 기술이 아무리 발달했다 하더라도, 현재까지도 사람의 의도를 완벽하게 인식하는 것은 난제로 남아있다.
예를 들어 운전자는 보행자를 보며 눈치껏 운전을 하지만, 자율주행차가 눈치껏 운전을 하게 하는 기술은 쉽지 않다.
심리학, 인지과학 등의 다양한 기술이 같이 풀어야 할 문제이다.
※ 참고자료 :
1. ‘자율주행 레벨 4를 바라보며’ - 로봇신문 명현 교수(KAIST 전기 및 전자공학부) 칼럼
(2020.12.21. http://m.irobotnews.com/news/articleView.html?idxno=23380)
2. 현대자동차그룹 웹진 - https://www.hyundai.co.kr/story/CONT0000000000076724
3. “어, 운전석에 아무도 없네?”… 레벨4 자율주행차 달린다 - 조선일보(2024.10.14.)
4. 운전자 없는 ‘레벨4’ 자율주행 시대 열린다…韓 기업 도전장 - 전자신문(2023.10.10.)
1. ‘자율주행 레벨 4를 바라보며’ - 로봇신문 명현 교수(KAIST 전기 및 전자공학부) 칼럼
(2020.12.21. http://m.irobotnews.com/news/articleView.html?idxno=23380)
2. 현대자동차그룹 웹진 - https://www.hyundai.co.kr/story/CONT0000000000076724
3. “어, 운전석에 아무도 없네?”… 레벨4 자율주행차 달린다 - 조선일보(2024.10.14.)
4. 운전자 없는 ‘레벨4’ 자율주행 시대 열린다…韓 기업 도전장 - 전자신문(2023.10.10.)







2024
Vol.47
November | December



